Название – самая сложная и ответственная часть любого продукта. От имени зависит успех вашего дела, особенно если это касается такой инновации как робот. Изобрели ли вы своего робота или – имя робота влияет на эффективность продвижения.
Предлагаем вашему вниманию советы по выбору имени. Эти рекомендации основаны на нашем опыте и мы с радостью делимся ими с вами.
Сначала возникает образ желаемого робота, потом он становится реальностью. Важно, чтобы имя сочеталось с внешним видом робота, отражало его идею и настроение, помогая человеку его воспринимать так, каким вы задумывали.
Подумайте, в какой отрасли вы работаете, найдите то, чем вы больше всего гордитесь и присоедините к корню этого слова, либо к названию своего бренда робототехнический корень «бот», «трон», «прайм», «дроид», «ер» или любую другую.
Отнеситесь к этому вопросу максимально серьезно и назовите робота так, чтобы он был максимально эффективен для Вас.
Например, название компании Промобот образовано от слияния слов Промоутер и робот. Таким же образом, свое имя получил Robonaut (робот+астронавт) – человекоподобный робот NASA, созданный для работы на МКС.
Робот RobonautМожно использовать аббревиатуры:
- Aibo – аббревиатура на английском: Artificial Intelligence RoBOt, а на японском айбо означает «любовь», «привязанность», а также может значить «товарищ»;
 Робот Aibo
Робот Aibo
- Робот из одноименного мультфильма WALL-E – тоже аббревиатура, образованная от waste allocation load lifter, Earth-class (мусоропогрузчик земного класса). Получилось благозвучное имя, сочетаемое с внешностью этого милого механизма.
 Робот WALL-E
Робот WALL-E
Робот – это сложный, высокотехнологичный, робототехнический продукт. Он помогает вам ассоциировать ваш бренд с будущим и инновациями. Поэтому, следует избегать имен, которые контрастируют с общепринятым образом будущего. Это:
– Человеческие имена и производные
Василий, Анатолий, Петрович, Аркадий, Иннокентий, Фёдор и т.д.
Некоторые человеческие имена и их производные обладают обыденностью. Впечатление, производимое высокими технологиями, разбивается, когда синтезированным голосом робот представляется: “Петрович”.
– Название обыденных неодушевленных предметов
Мандарин, Стол, Стул, Балкон, Болт, Лестница и т.д.
Робот является частью социосреды. Антропоморфные роботы воспринимаются как одушевленные объекты. Если у такого робота имя – это название неодушевленного предмета, то у человека возникает когнитивный диссонанс. Это затрудняет коммуникацию.
– Применение уменьшительно-ласкательных суффиксов
Роботик, Митрофанчик, Зайчик, Интеллектушка, Федечка, Антоша т.д.
Применение уменьшительно-ласкательных форм даёт ассоциацию с чем-то детским, игрушечным и автоматически лишает робота серьезности и высокотехнологичности в глазах клиентов, что в свою очередь негативно влияет на финансовые показатели компаний, в которых работает робот.
– Политические и религиозные имена
Коммунист, Либерал, Патриот, Обама, Меркель, Путин, Медведев, Патриарх, Епископ, Мулла т.д.
Роботы. Пока еще это экзотика, но тем не менее, они все увереннее входят в нашу жизнь. Три закона роботехники Айзека Айзимова скоро перестанут быть только развлекательной литературой. Роботы – существа, которые одновременно завораживают и пугают своей человечностью и одновременно машинностью. Производство роботов развивается постоянно. Посмотрите на десятку самых интересных экземпляров на сегодняшний день.
ASIMO: Робот-гуманоид
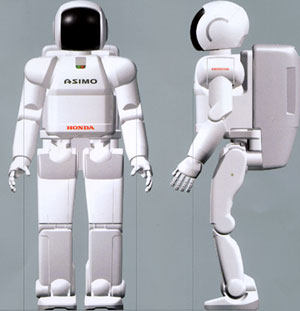
ASIMO – это робот-гуманоид, созданный компанией Хонда. Ростом в 130 сантиметров и весом в 54 килограмма, робот похож на маленького астронавта, который несет рюкзак. Он умеет ходить на двух ногах, копируя человеческую походку скоростью в 6 км/ч. ASIMO был создан в Японии в «Центре исследований и развития» Хонды. Эта последняя модель в серии, а всего их одиннадцать, первый робот был создан в 1986 году.
Официально имя робота – это сокращение от "Advanced Step in Innovative MObility", то есть буквально «Продвинутый шаг в передовой мобильности».в 2002 году существовало 20 роботов ASIMO. Каждый стоит миллион долларов за производство, и некоторые экземпляры можно взять напрокат за 150 тысяч долларов в месяц.
Распознавание движущихся объектов
Используя зрительную информацию, которую собирает вмонтированная в голову робота видеокамера, ASIMO распознает движения множества объектов, а также оценивает расстояние от них и их направление. С помощью комплекса этих технологий робот может следить за перемещениями людей камерой, следовать за человеком или поприветствовать его, когда он приближается.
Распознавание поз и жестов
ASIMO умеет интерпретировать позиции и движения руки, распознавать позы и жесты. Благодаря чему робот может реагировать не только на голосовые команды, но и на естественные телодвижения людей. Таким образом он, например, понимает, когда ему предлагают рукопожатие или когда человек ему машет, и отвечает взаимностью. Кроме того, он понимает, когда ему указывают направление движения.
Распознавание окружающей среды
ASIMO умеет анализировать окружающие объекты и ландшафт и действовать так, чтобы это было безопасно для него и находящихся рядом людей. Например, он узнает потенциально рискованные объекты, такие, как лестницы, а также останавливается или обходит людей и другие движущиеся объекты, чтобы не столкнуться с ними.
Распознавание звуков
Возможности робота распознавать род звуков углубились, и теперь он знает разницу между голосами и прочими звуками. Он отвечает на свое имя, поворачивается лицом к человеку, с которым разговаривает, реагирует на внезапные необычные звуки вроде упавшего предмета или столкновения, и поворачивает голову в этом направлении.
Распознавание лиц
ASIMO может узнавать человеческие лица, даже когда человек двигается. Он может отдельно различать 10 человеческих лиц. Когда их зарегистрируют в его памяти, он будет обращаться к ним по имени.

Albert Hubo: робот-Эйнштейн

Робот Альберт Хубо (Albert HUBO) – андроидный робот. Его внешний вид составляет голова, которая копирует голову ученого Альберта Эйнштейна, и туловище довольно известного гуманоидного робота Хубо. Период разработки составил три месяца и завершился в ноябре 2005 года. Голова была разработана компанией Hanson-Robotics. Тело сделано из специфического материала, Frubber, который частенько используют в Голливуде.
Голова имеет 35 суставов, благодаря чему может выражать различные эмоции на лице, пользуясь независимыми движениями глаз и губ. Также в голове есть две CCD камеры для визуального распознавания. Кроме того, Альберт умеет вытворять все присущие Хубо представления, поэтому возможно выражать еще больше естественных человеческих движений и манер поведения. В теле спрятаны полимерные литиевые батареи, которые обеспечивают около двух с половиной часов автономной работы робота.
С помощью удаленной сети роботом Альбертом можно управлять из внешнего компьютера. Впервые Альберт Хумо был представлен в 2005 году на саммите АПЕК в Пусане (Корея). Его похвалили многие мировые лидеры: президент США, премьер-министр Японии и т.п.

Stanley: самоуправляемое транспортное средство

Стэнли (Stanley) – это автономное средство передвижения, созданное гоночной командой Стэнфордского университета. Это обычный Фольксваген Туарег, доработанный до возможности управления только бортовыми компьютерами. Он принимал участие и победил в DARPA Grand Challenge в 2005 году и принес Стаэнфордской гоночной команде приз размером в два миллиона долларов, самый большой денежный приз за всю историю роботов.
Сенсоры, использованные в Стэнли, включают в себя пять лазерных лидаров, пару радаров, стереокамеру и однообъективную камеру. Обрабатывают информацию и определяют позицию машины GPS-приемник, GPS-компас, инерционная система управления, а информацию об одометрии колес получает внутренняя CAN шина Туарега. Компьютерная часть – это шесть мощных компьютеров Intel Pentium M с разными конфигурациями и операционными системами Линукс.
Стэнли наделена системой обнаружения приближающихся препятствий. Данные из лидаров скомбинированы с изображениями из визуальной системы, чтобы составить более полную картину обзора. Если приемлимую дорогу невозможно распознать хотя бы на ближайшие 40 метров, скорость снижается, а лидары ищут безопасный путь.
Кстати, вождение Стэнли программировали, пользуясь записью человеческого вождения в пустыне, а затем устанавливая точное значение каждому биту информации, создаваемой его системой сенсоров. После этой модификации машина-робот начала кататься со скоростью 45 миль в час по дорогам, пересеченным тенями деревьев. Пока точные значения для данных не были заданы, машина испуганно сворачивала с дороги, уверенная, что путь пересечен не тенями, а ямами.

BigDog: робот-мул
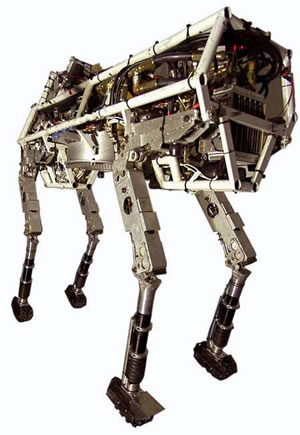
БогДог (BigDog, буквально – Большой Пес) – это четвероногий робот, созданный компанией Boston Dynamics в 2005 году. Проект БигДог финансировало Агентство защиты передовых исследований в надежде, что это создание сможет служить роботом-мулом для солдат на слишком грубой для транспорта местности.
БигДог весит 75 килограммов, он метровый в длину, а в высоты – 0, 7 метра. На данный момент он может путешествовать по тяжелой для передвижения местности со скоростью 5,3 км/ч, нести вес в 54 килограмма и карабкаться по склонам наклоном в 35 градусов.

RiSE: карабкающийся робот

Райз (RiSE) – это маленький шестилапый робот, который забирается по вертикальным поверхностям: стенам, деревьям, заборам. На пятках Райза имеются когти, микрокогти или липкий материал, в зависимости от поверхности, по которой надо лазать. Робот меняет позы, чтобы приспособиться к наклону поверхности, а зафиксированный хвост помогает балансировать на крутых поверхностях. Малыш весит всего 2 килограмма, в длину составляет 0,25 метра, бегает со скоростью 0,3 м/с.
Каждая из шести лап робота оснащена двумя электромоторами. Бортовой компьютер управляет лапами, определяет способ коммуникации с землей и обсуживает разнообразные сенсоры. В том числе сенсор, рассчитывающий инертность, сенсор позиции сустава для каждой лапы, сенсор натяжения лап и датчик контакта ступней.
Будущие версии Райза будут использовать сухое прилипание, чтобы карабкаться по совершенно гладким отвесным поверхностям, таким как стекло и металл. Райз разработали совместно исследователи Пенсильванского университета, университетов Карнеги Меллон, Беркли, Стэнфорда, а также университета Льюиса и Кларка. Проект спонсировал Офис защиты науки DARPA.
QRIO: танцующий робот
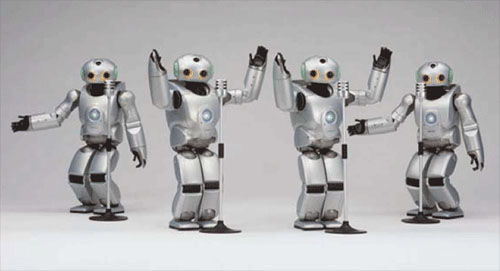
QRIO ("Quest for cuRIOsity" – «Задача для любопытства») – это двуногий гуманоидный робот для развлечения, созданный и проданный Сони, чтобы не затухал успех их игрушки AIBO (робот-собачка). QRIO обладает ростом в 0,6 метра и весит 7,3 килограмма.
Робот умеет распознавать голоса и лица, благодаря чему может запоминать людей и их пристрастия и антипатии. Он умеет бегать со скоростью 23 см в секунду, что зафиксировано в Книге рекордов Гиннеса (2005 года) как первый, самый скоростной, двуногий робот, который бегает. Робот QRIO четвертого поколения работает от батареи час.
Четвертое поколение этих роботов умеет танцевать под Hell Yes, музыкальный клип исполнителя Beck. Эти экземпляры дополнены третьей камерой на лбу, и у них улучшили руки и запястья. Программисты работали три недели, чтобы обучить этих роботов хореографии.
Какой механизм можно назвать роботом?
Как часто бывает в молодой области человеческой деятельности, в робототехнике нет еще устоявшейся, общепризнанной терминологии.
Обратимся к густонаселенному в наше время миру машин и механизмов. Немалое их число выполняет такую работу, которую еще совсем недавно человек делал сам. Не будем далеко ходить за примерами. Оглядимся вокруг. Многие из нас уже не вертят ручку домашней "мельнички" для кофе, а включают электрическую кофемолку, и она за несколько секунд измельчает кофейные зерна, т. е. делает это за нас. Так же обстоит дело с электропилой, электродрелью и т. д. Но вряд ли вы назовете все эти механизмы роботами. В чем же дело? Что отличает робота, например, от электрифицированного инструмента?
Рис. 12. Две главные части робота: 1 - исполнительный механизм ("рука") и 2 - "мозг" (управляющее "рукой" устройство).
Чтобы разобраться в главном, мы не будем углубляться в вопросы терминологического характера. Присоединимся к мнению тех, кто считает, что роботом можно назвать такое устройство, у которого имеются в совокупности две основные части: исполнительный механизм - "рука" 1 и система управления этим механизмом - "мозг" 2 робота (рис. 12). Такое представление о роботе сразу же проясняет вопрос о том, почему электроинструменты - это не роботы: у них нет, кроме простого выключателя, системы, управляющей исполнительным механизмом (пилой, сверлом и пр.).

Рис. 13. Конструкция промышленного робота, компактно объединяющая его "руку" и "мозг"

Рис. 14. Механическая "рука" робота - манипулятор; 1 - захват (рабочее звено).
Выглядит промышленный робот, например, так, как изображенный на рисунке 13: у этого робота хорошо видна "рука" 1, а "мозг" спрятан в корпусе 2.
Муж с утра уехал на дачу. А мы с детьми устроили генеральную уборку. Полтора месяца домой приходили только ночевать. "Надо отдраить дом после этих грязных выборов", -- заявила Лера. Пока отдраивали, выяснили, что пылесос почти умер. Решили новый купить. Собрались, было, пойти по пути Колпакова и купить моющий. Пошарили в интернете. Дошарились до робота-пылесоса. Страшно возбудились. Матвей, покрутив пальцем у виска, свалил в кафе -- вроде как не при делах, а мы с Лерой почти в ночи -- в круглосуточный "Юлмарт". Пока ехали, мама рыдала в трубку от хохота: "Робота?!! Ну вы артистки"... От хохота -- потому что не понимала до конца серьёзности наших намерений.
В магазине фурор произвели с порога. Посмотреть на нас сбежались сразу четыре продавца: Александр, Иван, Глеб и Роберт. "Хорошая покупка-то?" -- спрашиваю про робота. "Да, -- говорит Глеб, -- оригинальная". Мы с Лерой ржать кидаемся, пацаны-продавцы -- тоже почти валяются. У нас, говорят, только один мужик такой пылесос купил. А другой вчера вертолет покупал с дистанционным управлением. Может, вертолет тоже возьмете? "Вы нас, -- говорю, -- сначала сфотографируйте, -- за оригинальность. За вертолетом в другой раз придем. Нам Матвею нужен". -- "Вы к нам обязательно приходите на Хэллоуин, в костюмах", -- в слезах просят продавцы. -- "А у вас, -- уточняю, -- вечеринка будет? Все в костюмах будут?" -- "Да какая вам разница, -- ржут пацаны. -- Вы, главное, приходите"...
В общем, достали нашего робота. И снова ржать принялись. Он катается-метет, уперся в меня. Ребята объясняют: "Это он к хозяйке принюхивается". А еще, когда робот заканчивает уборку, он должен сам парковаться (!!!) на базу. "А как-как?" -- вопим. "Надо сказать: "Фас!!!" -- учат пацаны.
Инструкция, которую нам распечатали на 28 листах, -- песня. Наш новый друг с искусственным интеллектом принимает решения сообразно текущей обстановке. Ну вы поняли: фас -- значит фас, мести -- значит мести. А если он застревает -- пытается выпутаться!!! Я чуть не разрыдалась. А когда у него не получается выпутаться, он прекращает бессмысленные попытки и переходит в режим ожидания. То есть нас с Лерой ждет!
"Как же нам назвать нашего нового друга?" -- страдает Лера уже несколько часов. -- "Главное, -- говорю, -- не Дундук, а то мы его запрограммируем на тупость"... "Назовите Вовой, -- пишет в смс Наумлюк. -- Представляешь: Владимир, отъебись! -- или феерическое "Хуй тебе, Володя!" Наумлюк, короче не понял, что мы с Лерой друга себе завели, а не мальчика для битья. Потому подумываем нашего робота Наумлюком назвать. В том смысле: "Давай, Наумлюк, отнаумлючь квартиру. А если тупить будет, мы ему всегда сможем сказать: "Ну и дундук ты, Наумлюк!".
В общем, мы сейчас принимаем предложения, как нам назвать нашего нового друга, который из любой ситуации в первую очередь пытается выпутаться сам, и только в крайних случаях ждет нас с Лерой. И не приставайте, он ещё не сильно наумлючил. Потому что ему надо 16 часов для первоначальной зарядки.
А Александру, Глебу, Ивану и Роберту -- миллион лучей добра в карму (я только ради них название магазина и написала, чтобы все, кто ценит чувство юмора, бежали к ним за покупками и хохотом). Лучших продавцов я за свою жизнь не видела. "Спасибо, -- вопили на прощанье мы с Лерой, -- вы нам так настроение подняли". -- "А уж вы нам как подняли!" -- кричали в ответ пацаны.
P.S. И предлагайте, пожалуйста, как нам робота назвать. Или действительно Наумлюком?
PPS. Мама, кстати, в легком шоке. Велела позвонить и доложить, как робот наумлючит. Муж тоже, кажется, в шоке. И это мы еще не рассказали, что после прочтения инструкции узнали, что нашего робота надо раз в месяц пылесосить обычным пылесосом))
Как часто бывает в молодой области человеческой деятельности, в робототехнике нет еще устоявшейся, общепризнанной терминологии. Споры среди специалистов по поводу того, какой же механизм можно назвать роботом, не утихают по сей день. А люди, не связанные с робототехникой, часто думают, что робот - это устройство, которое выполняет за человека те или иные трудовые операции. Так ли это?
Обратимся к густонаселенному в наше время миру машин и механизмов. Немалое их число выполняет такую работу, которую еще совсем недавно человек делал сам. Не будем далеко ходить за примерами. Оглядимся вокруг. Многие из нас уже не вертят ручку домашней "мельнички" для кофе, а включают электрическую кофемолку, и она за несколько секунд измельчает кофейные зерна, т. е. делает это за нас. Так же обстоит дело с электропилой, электродрелью и т. д. Но вряд ли вы назовете все эти механизмы роботами. В чем же дело? Что отличает робота, например, от электрифицированного инструмента?
Рис. 12. Две главные части робота: 1 - исполнительный механизм ("рука") и 2 - "мозг" (управляющее "рукой" устройство).
Чтобы разобраться в главном, мы не будем углубляться в вопросы терминологического характера. Присоединимся к мнению тех, кто считает, что роботом можно назвать такое устройство, у которого имеются в совокупности две основные части: исполнительный механизм - "рука" 1 и система управления этим механизмом - "мозг" 2 робота (рис. 12). Такое представление о роботе сразу же проясняет вопрос о том, почему электроинструменты - это не роботы: у них нет, кроме простого выключателя, системы, управляющей исполнительным механизмом (пилой, сверлом и пр.).

Рис. 13. Конструкция промышленного робота, компактно объединяющая его "руку" и "мозг"

Рис. 14. Механическая "рука" робота - манипулятор; 1 - захват (рабочее звено).
Выглядит промышленный робот, например, так, как изображенный на рисунке 13: у этого робота хорошо видна "рука" 1, а "мозг" спрятан в корпусе 2.
Самая сложная часть в конструкции робота - это, как и в организме человека,- "мозг". Поэтому начнем знакомство с роботом с более простой его части - исполнительного механизма.